紗管智能搬運機器人 LK-CX03-05-50(Ⅲ代)
瀏覽量:
4451次 發(fā)布時間:
2021-01-09
相關(guān)介紹
三代磁吸式智能搬運機器人針對不同的作業(yè)場景����,優(yōu)化外型尺寸�,使得機器人對作業(yè)場地的使用范圍更廣,在棉紡行業(yè)細紗機-絡(luò)筒機工序段��,磁吸式智能搬運機器人表現(xiàn)優(yōu)異,可大幅降低工人勞動強度���,減員增效����,提升企業(yè)智能化程度����。
技術(shù)優(yōu)化與核心:
完善的自主導(dǎo)航技術(shù)(基于視覺和激光相結(jié)合的自主導(dǎo)航系統(tǒng)),完成對工廠的任何可同行區(qū)域的自主地圖建模�����,自動規(guī)劃作業(yè)目標路徑�����、過程中自動避障等���。
健全的自動調(diào)度系統(tǒng):
實時掌控每一個機器人作業(yè)狀態(tài)��、就近指揮機器人自主作業(yè)��、監(jiān)測機器人作業(yè)狀態(tài)參數(shù)�����、自主充電與電量報警�����、交通管制等功能模塊��。
可靠的目標識別系統(tǒng)與二次定位:
機器人在作業(yè)過程中通過視覺及激光多傳感融合算法對目標物進行二次識別�,識別快速準確���。
穩(wěn)定的磁吸作業(yè)執(zhí)行:
運動載體在識別目標物和調(diào)整機器人抵達作業(yè)點后�����,自動發(fā)出磁吸執(zhí)行作業(yè)的動作指令�,接到指令后完成相應(yīng)的運動規(guī)劃和目標抓取�����。
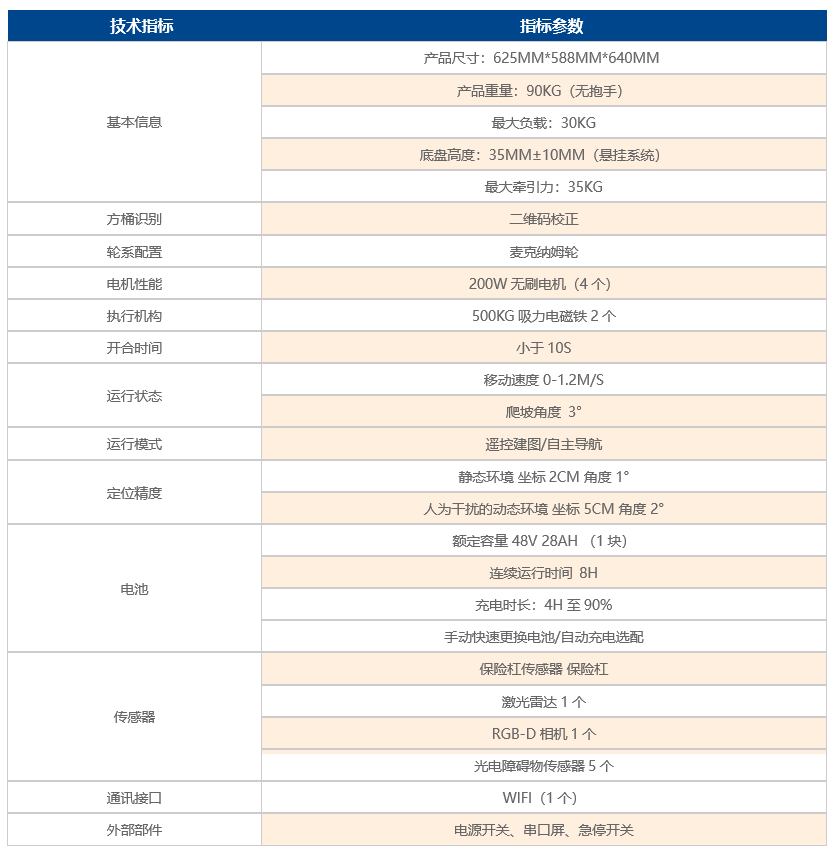
參數(shù)表
適用場景